 Get in touch
Get in touch

1. Giới thiệu: Giải mã mã lực động cơ cảm ứng xoay chiều Động cơ cảm ứng AC là một trong những...
ĐỌC THÊMTin tức ngành
2026-04-21
Động cơ DC (dòng điện một chiều) chuyển đổi năng lượng điện thành chuyển động quay cơ học bằng cách sử dụng sự tương tác giữa từ trường và dây dẫn mang dòng điện. Nguyên lý hoạt động tuân theo định luật lực Lorentz: khi dòng điện chạy qua một dây dẫn đặt bên trong từ trường, dây dẫn chịu một lực vuông góc với cả hướng của dòng điện và hướng của trường. Bố trí đủ dây dẫn mang dòng điện trong một cụm quay và lực đó trở thành mômen quay liên tục.
Về mặt thực tế, động cơ DC có hai hệ thống từ tính cơ bản. các stato cung cấp một từ trường đứng yên - từ nam châm vĩnh cửu hoặc nam châm điện (cuộn dây kích từ). các cánh quạt (còn gọi là phần ứng) mang các dây dẫn được kết nối với nguồn điện DC bên ngoài. Dòng điện chạy qua dây dẫn rôto phản ứng với từ trường stato để tạo ra mômen quay, làm quay rôto. Miễn là có điện áp DC, động cơ vẫn tiếp tục quay.
Tốc độ trong động cơ DC chủ yếu được điều khiển bởi điện áp đặt vào: điện áp cao hơn sẽ tạo ra vòng quay nhanh hơn. Mô-men xoắn đầu ra tỷ lệ thuận với dòng điện phần ứng. Mối quan hệ đơn giản giữa điện áp, dòng điện, tốc độ và mô-men xoắn làm cho động cơ DC trở nên cực kỳ dễ điều khiển trên phạm vi hoạt động rộng — một đặc tính giải thích sự thống trị liên tục của chúng trong các ứng dụng truyền động có tốc độ thay đổi.
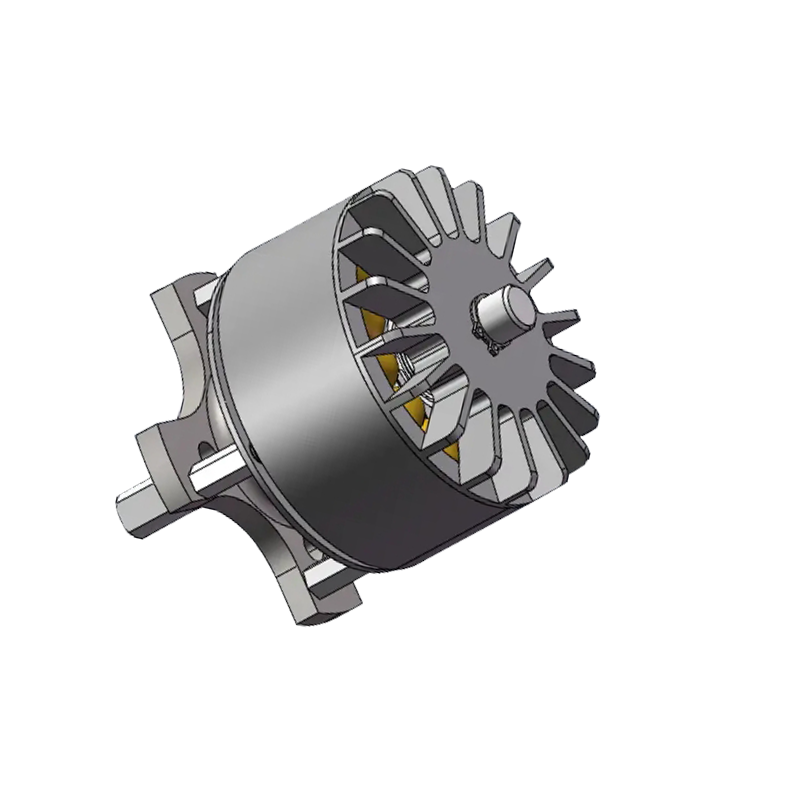
Cấu trúc bên trong của động cơ DC khác nhau giữa thiết kế có chổi than và không chổi than, nhưng một số thành phần cốt lõi đều phổ biến ở cả hai loại.
Stator là bộ phận cố định bên ngoài của động cơ. Trong động cơ DC công suất nhỏ và nhỏ, từ trường stato được tạo ra bằng nam châm vĩnh cửu cố định vào lỗ bên trong của vỏ động cơ. Trong các động cơ DC công nghiệp lớn hơn, stato mang cuộn dây kích từ - cuộn dây quấn quanh các cực - qua đó một dòng điện kích thích DC riêng biệt chạy qua để tạo ra từ trường. Khung stato thường được làm bằng thép silicon nhiều lớp để giảm thiểu tổn thất dòng điện xoáy.
Rôto là cụm quay được gắn trên trục động cơ. Nó bao gồm một lõi sắt nhiều lớp với các rãnh được gia công xung quanh chu vi của nó, trong đó các cuộn dây phần ứng được quấn vào. Cấu trúc nhiều lớp làm giảm tổn thất dòng điện xoáy trong bàn ủi. Trong động cơ DC có chổi than, rôto mang cuộn dây quấn; thay vào đó, trong động cơ DC không chổi than, rôto mang nam châm vĩnh cửu.
Cổ góp là một vòng đồng phân đoạn được gắn trên trục rôto. Mỗi đoạn kết nối với một cuộn dây phần ứng khác nhau. Chổi than - các tiếp điểm lò xo gắn trong vỏ stato - ấn vào bề mặt cổ góp và duy trì tiếp xúc điện khi trục quay. Khi rôto quay, các bộ phận chuyển mạch lần lượt đi qua chổi than, tự động chuyển hướng dòng điện trong mỗi cuộn dây vào đúng thời điểm để giữ cho mô-men xoắn hoạt động theo hướng quay nhất quán. Chuyển mạch cơ học này là yếu tố xác định động cơ DC có chổi than.
Cuộn dây phần ứng là dây dẫn bằng đồng cách điện được quấn vào các khe rôto. Cấu hình cuộn dây - vòng, sóng hoặc đơn giản - xác định số đường dẫn dòng điện song song qua phần ứng và ảnh hưởng đến đặc tính mô-men xoắn tốc độ của động cơ. Các cuộn dây kích từ trên stato, nếu có, sẽ được quấn để tạo ra số cực từ chính xác cho tốc độ thiết kế và phạm vi mô men xoắn.
Trục đầu ra truyền mômen cơ học tới tải. Vòng bi chính xác hoặc vòng bi tay áo hỗ trợ trục ở mỗi đầu của vỏ, duy trì khe hở không khí giữa rôto và stato trong phạm vi dung sai chặt chẽ. Vỏ (chuông cuối và khung) cung cấp hỗ trợ về cấu trúc, bảo vệ các bộ phận bên trong và trong một số thiết kế còn kết hợp các cánh tản nhiệt hoặc bộ phận lắp đặt cho quạt bên ngoài.
Trong động cơ một chiều có chổi than, cổ góp và chổi than thực hiện chức năng chuyển mạch dòng điện một cách cơ học. Khi phần ứng quay, các đoạn cổ góp di chuyển qua các tiếp điểm chổi than cố định, nối từng cuộn dây phần ứng với nguồn điện theo trình tự. Điều này đảm bảo rằng bất kể vị trí của rôto, cuộn dây hiện được căn chỉnh theo khe hở cực của stato luôn mang dòng điện theo đúng hướng để tạo ra mô-men xoắn thuận.
Kết quả là một động cơ chạy trực tiếp từ nguồn DC mà không cần chuyển mạch điện tử bên ngoài. Kết nối động cơ DC có chổi than với pin hoặc nguồn DC được điều chỉnh và nó sẽ quay ngay lập tức. Đảo ngược cực và nó đảo ngược hướng. Sự đơn giản này là lý do chính khiến động cơ chổi than vẫn được sử dụng rộng rãi trong các ứng dụng có độ phức tạp từ thấp đến trung bình, nhạy cảm với chi phí.
Sự tiếp xúc cơ học giữa chổi than và cổ góp gây ra những hạn chế chính của động cơ. Ma sát của cổ góp chổi than tạo ra nhiệt và các mảnh vụn mài mòn, đồng thời phóng điện hồ quang xảy ra khi chuyển mạch các đoạn tạo ra nhiễu điện từ (EMI). Thường phải thay chổi than sau mỗi 1.000–5.000 giờ hoạt động tùy thuộc vào tải hiện tại, tốc độ và môi trường hoạt động. Bề mặt cổ góp cũng yêu cầu kiểm tra và tái tạo bề mặt định kỳ.
Động cơ DC có chổi than không thích hợp để sử dụng trong môi trường dễ cháy hoặc nổ vì hồ quang chổi than có thể đốt cháy các loại khí xung quanh. Chúng cũng bị giới hạn ở tốc độ tối đa bởi các ràng buộc cơ học của tiếp điểm chổi than-cổ góp, thường đạt tốc độ tối đa ở tốc độ tối đa. 3.000–8.000 vòng/phút trong hầu hết các thiết kế.

Động cơ DC không chổi than (BLDC) loại bỏ hoàn toàn cụm cổ góp và chổi than bằng cách di chuyển các nam châm vĩnh cửu sang rôto và cuộn dây đến stato. Việc chuyển đổi dòng điện - chuyển mạch - được xử lý điện tử bởi bộ điều khiển động cơ giám sát vị trí rôto thông qua cảm biến hiệu ứng Hall hoặc phát hiện EMF ngược và cấp điện cho cuộn dây stato theo đúng trình tự để duy trì chuyển động quay.
Sự đảo ngược kiến trúc này có những hậu quả đáng kể đối với hiệu suất, bảo trì và phạm vi ứng dụng.
| đặc trưng | Động cơ DC chải | Động cơ DC không chổi than |
|---|---|---|
| Phương pháp giao hoán | Cơ khí (cổ góp bàn chải) | Điện tử (điều khiển cảm biến) |
| Hiệu quả | 75–85% | 85–95% |
| Bảo trì | Cần thay bàn chải thường xuyên | Tối thiểu - chỉ vòng bi |
| Phạm vi tốc độ | Lên đến ~ 8.000 vòng/phút điển hình | Có thể lên tới 100.000 vòng/phút |
| EMI / hồ quang | Bàn chải đáng kể | Thấp (không tiếp xúc với bàn chải) |
| Sự phù hợp với môi trường nguy hiểm | Không phù hợp (bàn chải hồ quang) | Phù hợp (không phóng hồ quang) |
| Yêu cầu bộ điều khiển | Điều khiển điện áp DC đơn giản | Cần có bộ điều khiển điện tử chuyên dụng |
| Đơn giá | Hạ xuống | Cao hơn (bộ điều khiển động cơ) |
| Tuổi thọ | Bị hạn chế bởi độ mòn của bàn chải | Dài hơn - không bị mòn các bộ phận tiếp xúc |
Ưu điểm về hiệu quả của động cơ không chổi than đặc biệt có ý nghĩa trong các ứng dụng chạy bằng pin. Hệ thống truyền động xe điện hoặc dụng cụ điện chạy động cơ BLDC với hiệu suất 92% so với động cơ tương đương có chổi than ở mức 80% sẽ trực tiếp chuyển thành thời gian chạy dài hơn cho mỗi lần sạc và giảm tải nhiệt cho bộ pin. Đây là động lực chính đằng sau sự chuyển đổi gần như phổ biến sang động cơ không chổi than trong các dụng cụ điện không dây, xe điện, máy bay không người lái và hệ thống HVAC trong hai thập kỷ qua.
Bất chấp những ưu điểm về hiệu suất của thiết kế không chổi than, động cơ DC có chổi than vẫn là lựa chọn chính xác trong một số danh mục ứng dụng.
Bộ điều khiển động cơ DC (còn gọi là bộ điều khiển DC hoặc bộ điều khiển DC) là gói điện tử công suất điều chỉnh điện áp và dòng điện cung cấp cho động cơ DC để điều khiển tốc độ, mô-men xoắn, gia tốc và hướng của nó. Động cơ và bộ truyền động cùng nhau tạo thành một hệ thống điều khiển chuyển động hoàn chỉnh - động cơ cung cấp đầu ra cơ học và bộ truyền động quản lý đầu vào điện để đạt được cấu hình chuyển động mong muốn.
Ổ đĩa DC chổi than truyền thống sử dụng kỹ thuật điều khiển pha thyristor (SCR) hoặc kỹ thuật điều chế độ rộng xung (PWM) để điều chỉnh điện áp phần ứng. Bộ truyền động bốn góc phần tư có thể kiểm soát tốc độ và mô-men xoắn theo cả hai hướng quay, cho phép phanh tái tạo - trong đó động cơ hoạt động như một máy phát điện trong quá trình giảm tốc, trả lại năng lượng cho bus cung cấp. Khả năng này được sử dụng rộng rãi trong các ứng dụng công nghiệp như máy cuộn, máy cán và tời, nơi việc giảm tốc được kiểm soát và thu hồi năng lượng là vấn đề quan trọng.
Độ chính xác điều chỉnh tốc độ của bộ truyền động DC có chổi than vòng kín với tín hiệu phản hồi của máy đo tốc độ thường là ±0,1% tốc độ cài đặt , điều này giải thích sự thống trị lâu dài của chúng trong lĩnh vực điều khiển chuyển động công nghiệp chính xác trước khi các bộ điều khiển tần số biến thiên AC phát triển vào những năm 1990.
Bộ điều khiển động cơ BLDC thực hiện chuyển mạch điện tử bằng cách đọc vị trí rôto — thông qua cảm biến hiệu ứng Hall được gắn trong động cơ hoặc thông qua ước tính EMF ngược không có cảm biến — và chuyển đổi dòng điện qua các pha của stato theo đúng trình tự. Bộ điều khiển cũng quản lý chu kỳ hoạt động của xung điện để điều chỉnh tốc độ và giám sát dòng điện để hạn chế mô-men xoắn. Các bộ truyền động BLDC phức tạp hơn thực hiện điều khiển hướng trường (FOC), giúp tối ưu hóa góc giữa từ trường stato và nam châm rôto để có mô-men xoắn cực đại trên mỗi ampe trên toàn dải tốc độ.
Trong các hệ thống chuyển động tích hợp - chẳng hạn như khớp robot, trục servo và trục CNC - động cơ BLDC và bộ truyền động của nó thường được ghép nối và điều chỉnh với nhau thành một bộ khớp. Các tham số biến tần bao gồm băng thông vòng lặp hiện tại, mức tăng vòng lặp vận tốc và thời gian chuyển mạch được cấu hình trong quá trình chạy thử và được lưu trữ trong bộ nhớ không biến đổi của biến tần.
Bối cảnh ứng dụng cho động cơ DC có chổi than và không chổi than phản ánh thế mạnh tương ứng của chúng về chi phí, bảo trì, phạm vi tốc độ và độ chính xác điều khiển.
1. Giới thiệu: Giải mã mã lực động cơ cảm ứng xoay chiều Động cơ cảm ứng AC là một trong những...
ĐỌC THÊM1. Giới thiệu Trong tự động hóa công nghiệp hiện đại, xây dựng trung tâm dữ liệu, nâng cấp điện tử tiêu dùng...
ĐỌC THÊMĐộng cơ bước đại diện cho nền tảng của điều khiển chuyển động hiện đại, mang lại khả năng định vị và điều chỉnh chính xác...
ĐỌC THÊMBối cảnh động cơ công nghiệp đang trải qua một sự chuyển đổi đáng kể, được thúc đẩy bởi sự phát triển không ngừng ...
ĐỌC THÊMSản phẩm liên quan
Tòa nhà 10, số 199, đường Jinfeng, khu công nghệ cao Tô Châu, tỉnh Giang Tô, Trung Quốc
+86-130 1379 7383
+86-512 6876 9967
sean@retekmotion.com
rsgrivic@126.com
 WhatsApp
WhatsApp
Bản quyền © Công ty TNHH Công nghệ Điện Tô Châu Retek Đã đăng ký Bản quyền. Custom OEM Industrial Multi Rotor Drone Motors Manufacturers













